Wiki : Projet Mercury
Documentation Technique
Centre de contrôle sol pour fusée expérimental avec tracking automatique
Sommaire Rapide
- 1. Contexte
- 2. Spécifications
- 2.1 Station sol
- 2.2 Station télémesures
- 2.3 Bilan de liaison RF
- 2.3.1. Objectif de l'Étude
- 2.3.2. Paramètres et Hypothèses du Système
- 2.3.3. Calcul de l'Affaiblissement en Espace Libre (FSPL)
- 2.3.4. Tableau du Bilan de Liaison (Link Budget)
- 2.3.5. Analyse de la Marge de Sécurité
- 2.3.6. Validation de l'Exigence Doppler (SOL-SW-01)
- 3. Hardware design
- 3.1 Diagramme de blocs
- 3.2 Bilan de puissance station sol
- 3.2.1. Contexte et Hypothèses
- 3.2.2. Bilan de Puissance
- 3.2.3. Calcul des Besoins Énergétiques
- 3.2.4. Dimensionnement de la Batterie et Poids Estimé
- 3.2.5. Conclusion
- 3.3 Bilan de puissance station télémesures
- 3.3.1. Contexte et Hypothèses
- 3.3.2. Bilan de Puissance
- 3.3.3. Calcul des Besoins Énergétiques
- 3.3.4. Dimensionnement de la Batterie
- 3.3.5. Conclusion
- 4. Architecture logiciel
- 4.1 Station sol
- 4.1.1. Choix Technologiques
- 4.1.2. Architecture Multi-Processus (Threading & Multiprocessing)
- 4.1.3. Agencement de l'Interface
- 4.1.4. Enregistrement Local des Données
- 4.1.5. Synchronisation et Export vers le Serveur d’ASI
- 4.2 Station télémesures
- 4.2.1. Objectif et Philosophie ROS 2
- 4.2.2. Topologie des Nœuds (Node Graph)
- 4.2.3. Arbre de Transformations Spatiales (TF2 Tree)
- 4.2.4. Communication avec la Station Sol (Ethernet DDS)
- 5.Analyse de risques
1. Contexte
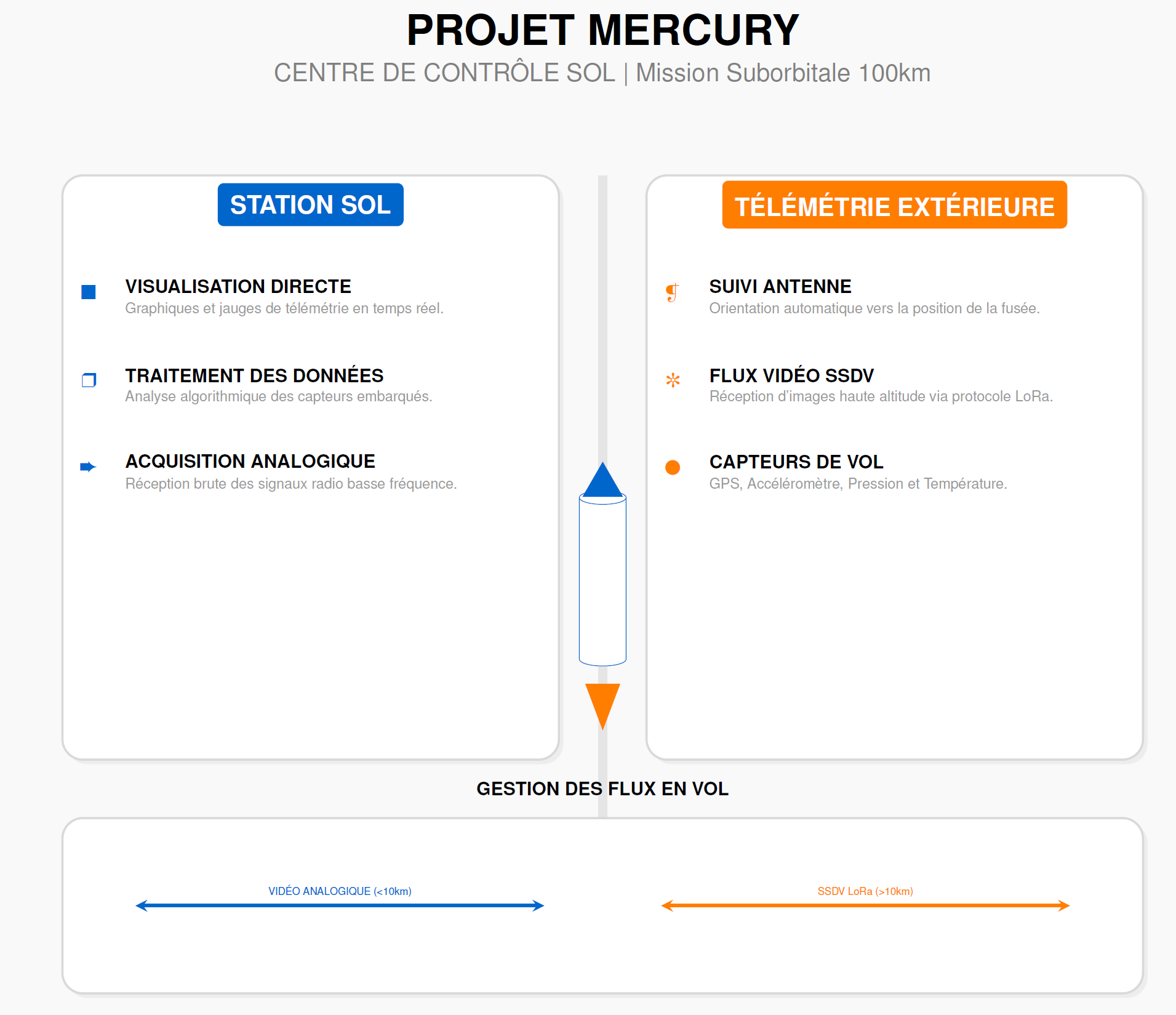
Le projet Mercury est un de centre de contrôle sol composé de deux parties :
- Station sol —> Ordinateur pour récupérer les données de la télémétrie analogique et afficher ces données de manière clair et structurée. Celui ci peux également transmettre des valeurs à la fusée (avant vol).
- Télémétrie —> Système de télémétrie analogique et LoRa avec tracker automatique pour pouvoir capter les paramètres de vol (accélération, position, vitesse, pression,…) et les flux vidéos. Celle ci n’est pas embarqué sur la fusée, elle est à l’extérieur de l’ordinateur (c’est sa propre structure).
Cela a pour mission de fonctionner avec des fusées voulant effectuer un Space shot (100km) et assurer le fonctionnement de tout les systèmes durant la durée complète de la mission (de la mise en rampe jusqu’à la récupération). Le flux vidéo fonctionnant pendant une plage « courte » du vol (entre 0 et 10 km grâce à un télémesure analogique) puis bascule sur un flux SSDV (Slow Scan Digital Video)sur le reste du vol (grâce aux LoRa).
2. Spécifications
2.1 Station sol
| ID | Catégorie | Description de la Spécification | Priorité |
| GS-COMP-01 | Calcul | Utilisation d'un Raspberry Pi Compute Module 5 comme unité centrale pour assurer le traitement des données de télémétrie. | CRITICAL |
| GS-COMP-02 | Calcul | Gestion d'un affichage double flux (Écran tactile principal + Écran secondaire de statut). | HIGH |
| GS-MECA-01 | Mécanique | Capable d'être fixée sur un support (type bras d'ordinateur VESA ou similaire). | MEDIUM |
| GS-MECA-02 | Mécanique | Poids total inférieur ou égal à 3 kg pour une portabilité optimale. | HIGH |
| GS-MECA-03 | Mécanique | Résistance à l'usure pour une durée de vie minimale de 10 ans. | MEDIUM |
| GS-MECA-04 | Mécanique | Stabilité et équilibre assurés quelle que soit la position de l'écran ou des supports clavier. | CRITICAL |
| GS-ELEC-01 | Électrique | Autonomie de la batterie supérieure à 13 heures (en accord avec le diagramme). | HIGH |
| GS-ELEC-02 | Électrique | Surveillance de l'alimentation et mise en place de modes de consommation intelligents. | CRITICAL |
| GS-ELEC-03 | Électrique | Recharge via un port DC Jack dédié avec protection contre les surtensions. | HIGH |
| GS-ELEC-04 | Électrique | Présence d'un bouton d'alimentation physique ON/OFF avec indicateur d'état. | CRITICAL |
| GS-DATA-01 | Données | Enregistrement automatique des logs sur SSD M.2 (via PCIe) pour la vitesse et sur Carte SD pour la redondance. | CRITICAL |
| GS-DATA-02 | Données | Latence d'affichage de la télémétrie inférieure à 100ms. | HIGH |
| GS-DATA-03 | Données | Capacité de communication longue distance via protocole LoRa et GSOV (jusqu'à 10km+). | CRITICAL |
| GS-COM-01 | Connectivité | Port Ethernet pour le transfert bidirectionnel de données et la configuration réseau. | HIGH |
| GS-COM-02 | Connectivité | Support sans fil via WiFi et Bluetooth (via PCIe Key E) pour les périphériques tiers. | MEDIUM |
| GS-COM-03 | Connectivité | Ports d'extension industriels : SPI, UART, CAN et GPIO (via connecteurs PicoClasp). | HIGH |
| GS-COM-04 | Connectivité | Port USB-C disponible pour le transfert de données externe ou le débogage. | MEDIUM |
| GS-UI-01 | Interface | Interface de saisie complète : Clavier AZERTY physique et Trackpad intégrés. | HIGH |
| GS-UI-02 | Interface | Contrôles analogiques rapides : Encodeur rotatif (Volume) et Encodeur à glissière (Luminosité). | MEDIUM |
| GS-UI-03 | Interface | Bouton Macro personnalisable pour déclencher des actions critiques (ex: Armement). | CRITICAL |
| GS-UI-04 | Interface | Écran secondaire dédié aux constantes vitales : Batterie, Heure, Température système. | HIGH |
| GS-UI-05 | Interface | Sortie audio double : Haut-parleurs stéréo et Prise Jack avec commutation automatique. | MEDIUM |
| GS-UI-06 | Interface | Alerte visuelle et sonore en cas de perte de signal RF ou dépassement de seuil critique. | CRITICAL |
| GS-OP-01 | Opérationnel | Capacité de se plier et se déplier pour faciliter le transport (Format "Mallette"). | MEDIUM |
| GS-OP-02 | Opérationnel | Interface de contrôle fusée (Avant vol) pour la transmission de paramètres de mission. | CRITICAL |
| GS-OP-03 | Opérationnel | Lancement automatique du programme de visualisation au démarrage. | HIGH |
| GS-ENV-01 | Environnement | Écran principal haute luminosité (>800 nits) lisible en plein soleil. | HIGH |
| GS-ENV-02 | Environnement | Plage de température de fonctionnement étendue : -10°C à +45°C. | HIGH |
| GS-ENV-03 | Environnement | Protection contre la poussière et les projections d'eau (IP54). | MEDIUM |
2.2 Station télémesures
| ID | Catégorie | Description de la Spécification | Priorité |
| SOL-MECA-01 | Mécanique | Le système Pan-Tilt doit autoriser une rotation en Azimut (360°) et en Élévation (0° à 90°). | CRITICAL |
| SOL-MECA-02 | Mécanique | L'IMU doit être fixée sur un mât déporté ou isolée magnétiquement des champs électromagnétiques des moteurs. | HIGH |
| SOL-MECA-03 | Mécanique | Un système mécanique (butée) ou électrique (slip ring) doit empêcher l'arrachement des câbles lors de rotations prolongées. | HIGH |
| SOL-ELEC-01 | Électrique | Les moteurs pas-à-pas doivent être pilotés par des drivers gérant le microstepping matériel (ex: TMC2209) pour minimiser les vibrations. | CRITICAL |
| SOL-ELEC-02 | Électrique | L'ordinateur "Edge" (Raspberry Pi 5) et le récepteur LoRa doivent être solidaires de l'antenne pour réduire la longueur du câble coaxial. | CRITICAL |
| SOL-ELEC-03 | Électrique | Alimentation isolée (UBEC/Régulateur séparé) pour le RPi 5 et les moteurs afin d'éviter un redémarrage du RPi lors des pics de consommation. | CRITICAL |
| SOL-ELEC-04 | Électrique | Intégration d'un capteur de tension/courant (type INA219) pour surveiller la batterie du trackeur avec alerte remontée sur l'ordinateur de contrôle. | HIGH |
| SOL-RF-01 | Radio | Utilisation d'une antenne directionnelle à haut gain (type Yagi-Uda) calibrée précisément sur la fréquence d'émission de la fusée. | CRITICAL |
| SOL-RF-02 | Radio | Intégration d'un filtre passe-bande (SAW filter) matériel avant le récepteur LoRa pour bloquer les interférences locales. | HIGH |
| SOL-RF-03 | Radio | Ajout d'un amplificateur faible bruit (LNA) sur la ligne de réception RF pour maximiser le rapport signal/bruit (SNR) à 100 km. | MEDIUM |
| SOL-SW-01 | Logiciel (RF) | La puce LoRa de réception doit être paramétrée avec une bande passante large ($ \ge 250\text{ kHz}$) pour absorber l'effet Doppler (Mach 3). | CRITICAL |
| SOL-SW-02 | Logiciel (RF) | La station doit posséder au moins deux récepteurs LoRa (ou un système dynamique) pour écouter simultanément sur différents Spreading Factors (SF). | HIGH |
| SOL-SW-03 | Logiciel (ROS) | Architecture distribuée : chaque fonction (Lecture GPS, IMU, Moteurs, Décodage LoRa) doit être un nœud ROS 2 indépendant. | HIGH |
| SOL-SW-04 | Logiciel (ROS) | Le calcul cinématique (suivi de la cible) doit utiliser la bibliothèque de transformation spatiale TF2 de ROS 2. | HIGH |
| SOL-SW-05 | Logiciel (ROS) | En cas de perte de signal GPS de la fusée, le système doit basculer automatiquement sur un algorithme de prédiction balistique (ex: Filtre de Kalman EKF). | CRITICAL |
| SOL-SW-06 | Logiciel (ROS) | Enregistrement continu de l'ensemble des données brutes (Topics ROS 2) via rosbag sur support physique dédié pour l'analyse post-vol. | CRITICAL |
| SOL-SW-07 | Logiciel (ROS) | Fonction "Watchdog" logicielle : en cas de plantage du nœud de calcul, les moteurs doivent se figer instantanément. | HIGH |
| SOL-SW-08 | Logiciel (Data) | Conversion des données brutes télémétriques en un format standardisé (JSON ou Protobuf) interprétable par l'interface de la station sol. | CRITICAL |
| SOL-COM-01 | Données | Transmission de la télémétrie décodée vers l'ordinateur de contrôle distant via un câble Ethernet physique (protocole TCP/IP via DDS). | HIGH |
| SOL-COM-02 | Données | Envoi d'un signal "Heartbeat" (battement de cœur) toutes les secondes vers la station sol pour confirmer l'état de la liaison. | CRITICAL |
| SOL-COM-03 | Données | Implémentation d'un buffer (tampon) de données pour éviter la perte de paquets en cas de micro-coupures réseau. | HIGH |
| SOL-NET-01 | Réseau | Attribution d'une adresse IP statique pour garantir une détection immédiate par la station sol au démarrage. | CRITICAL |
| SOL-NET-02 | Réseau | Synchronisation temporelle (via protocole PTP ou NTP) avec la station sol pour assurer la cohérence des horodatages de vol. | HIGH |
| SOL-OP-01 | Opérationnel | Le trackeur doit intégrer son propre module GPS pour un auto-étalonnage (position absolue) au démarrage sur le site de lancement. | HIGH |
| SOL-OP-02 | Opérationnel | Le système doit inclure des capteurs de fin de course (Endstops) ou encodeurs pour réaliser une séquence de "Homing" au démarrage. | HIGH |
| SOL-ENV-01 | Environnement | Tropicalisation (Conformal Coating) des cartes électroniques exposées et boîtier IP54 pour résister à l'humidité et à la poussière. | MEDIUM |
| SOL-ENV-02 | Environnement | Le système d'engrenages/courroies du Pan-Tilt doit être caréné pour éviter le blocage par du sable ou des débris. | MEDIUM |
2.3 Bilan de liaison RF
2.3.1. Objectif de l'Étude
L'objectif de ce document est de valider mathématiquement la capacité de la Station de Télémesures au sol à recevoir un flux de données (LoRa / SSDV) provenant d'une fusée expérimentale atteignant un apogée de 100 kilomètres (Space Shot).
Le calcul du bilan de liaison permet de déterminer la Marge de Liaison (Link Margin). En ingénierie aérospatiale, une marge supérieure à 10 dB est requise pour garantir une réception sans perte de paquets, malgré les aléas atmosphériques et la rotation de la fusée.
2.3.2. Paramètres et Hypothèses du Système
L'étude est réalisée sur la bande de fréquence ISM européenne standard, avec des paramètres d'émission typiques pour l'aérospatial étudiant.
- Fréquence de transmission (f) : 868 MHz
- Distance maximale (d) : 100 km
- Modulation : LoRa (Spreading Factor: SF9, Bandwidth: 250kHz)
- Sensibilité du récepteur (LoRa SF9) : -124 dBm
- Vitesse maximale de la fusée : Mach 3 (1020 m/s)
2.3.3. Calcul de l'Affaiblissement en Espace Libre (FSPL)
L'affaiblissement en espace libre (Free Space Path Loss) représente la perte de puissance du signal électromagnétique au fur et à mesure qu'il se propage dans l'espace.
La formule de Friis s'exprime ainsi :
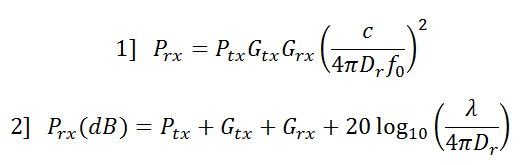
(Avec d en kilomètres et f vuen MHz)
Application numérique pour l'apogée :
À 100 km, le signal subit donc une atténuation naturelle de -131.2 dB.
2.3.4. Tableau du Bilan de Liaison (Link Budget)
Le bilan de liaison additionne la puissance d'émission, les gains des antennes et les amplificateurs, et soustrait l'ensemble des pertes du système.
| Élément du système | Valeur | Unité | Remarque / Justification |
| A. Segment Spatial (Fusée) | |||
| Puissance d'émission (Tx) | +27.0 | dBm | Émetteur télémétrique (ex: 500\text{ mW}). |
| Perte câble coaxial Tx | -1.0 | dB | Atténuation du câble entre le PCB et l'antenne fusée. |
| Gain Antenne fusée | +2.0 | dBi | Antenne dipôle ou patch intégrée dans la coiffe. |
| B. Propagation | |||
| Affaiblissement Espace Libre | -131.2 | dB | Perte FSPL à 100\text{ km} d'altitude calculée ci-dessus. |
| Perte de Polarisation | -3.0 | dB | Perte moyenne due au roulis (roll) aléatoire de la fusée. |
| C. Segment Sol (Tracker Mercury) | |||
| Gain Antenne Yagi-Uda | +14.0 | dBi | Antenne directionnelle à fort gain (Exigence SOL-RF-01). |
| Gain Amplificateur (LNA) | +15.0 | dB | Amplificateur Faible Bruit (Exigence SOL-RF-03). |
| Perte Filtre SAW & Connecteurs | -2.5 | dB | Filtre passe-bande bloquant les interférences 4G/GSM. |
| Perte câble coaxial Rx | -0.5 | dB | Câble très court (Exigence SOL-ELEC-02). |
| Puissance Reçue Estimée (PRx) | -79.2 | dBm | Somme de tous les éléments ci-dessus. |
2.3.5. Analyse de la Marge de Sécurité
La Marge de Liaison se calcule en soustrayant la sensibilité matérielle du récepteur à la puissance réellement reçue par l'antenne sol.
Conclusion sur la portée : Une marge de sécurité de +44.8 dB est exceptionnelle. Le seuil de viabilité en aérospatial étant de +10 dB, ce résultat démontre qu'avec l'architecture RF choisie (Antenne Yagi + LNA + LoRa), la Station Mercury captera sans aucune difficulté le signal à 100 km d'altitude. La liaison survivra même si la fusée effectue des rotations violentes (pertes de polarisation extrêmes).
2.3.6. Validation de l'Exigence Doppler (SOL-SW-01)
L'exigence SOL-SW-01 stipule une bande passante LoRa BW 250kHz pour absorber l'effet Doppler généré par la vitesse balistique (Mach 3).
Calcul du décalage de fréquence Doppler (\Delta f) :
- f_0 = 868 MHz (868 * 10^6 Hz)
- v = 1020 m/s (Mach 3)
- c = 3 * 10^8 m/s (Vitesse de la lumière)
Conclusion Doppler : À Mach 3, la fréquence de la fusée se décalera d'environ 3 kHz. Une bande passante classique (ex: 62.5 kHz) risquerait de désynchroniser le récepteur. En utilisant une bande passante élargie (BW 250 kHz) couplée au balayage multi-SF des puces LoRa, l'effet Doppler de la fusée est parfaitement absorbé sans aucun risque de perte de verrouillage matériel (Lock Loss).
3. Hardware design
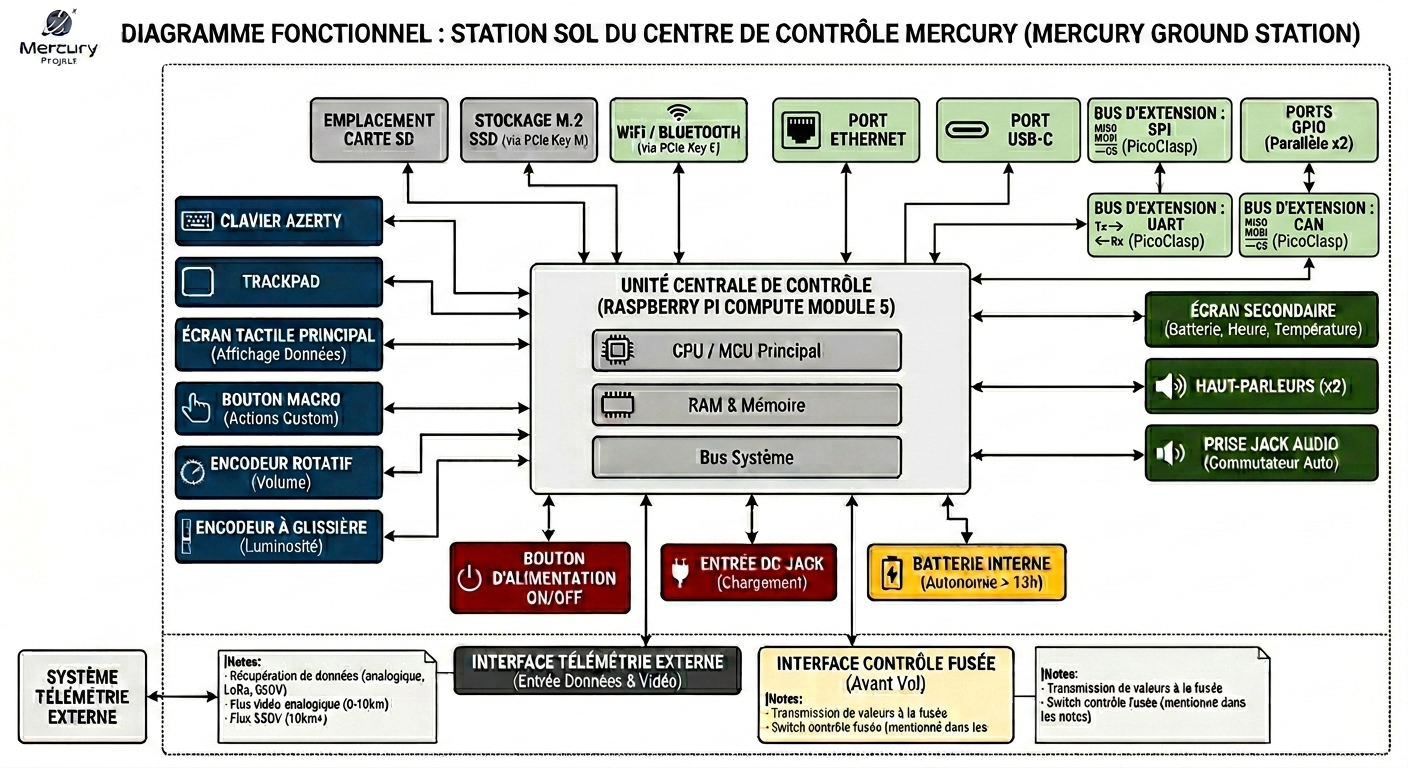
3.1 Diagramme de blocs
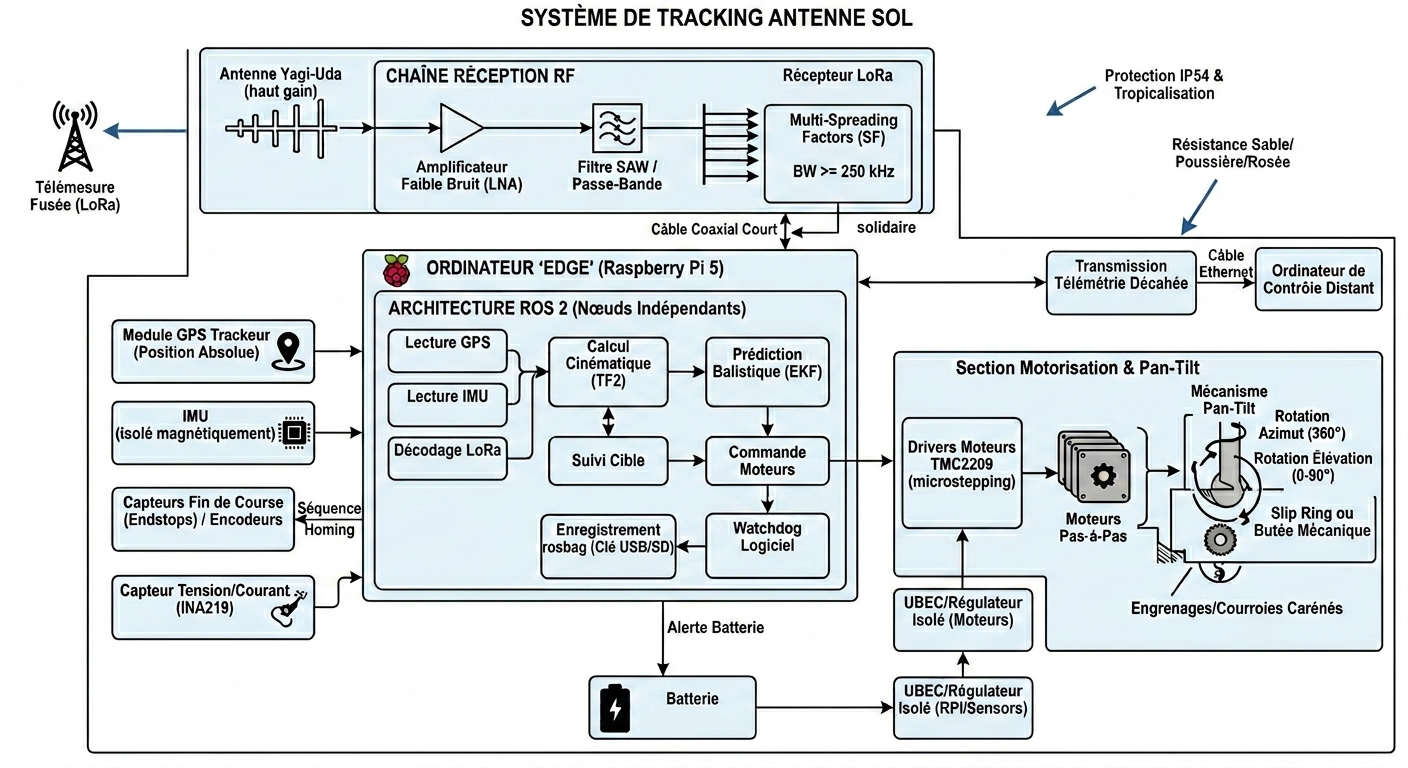
3.2 Bilan de puissance station sol
Sous-système : Station Sol (Mercury Ground Station)
Révision : 1.0
Objectif : Dimensionnement de l'alimentation embarquée pour répondre à une exigence d'autonomie cible de 3 heures en conditions opérationnelles nominales.
3.2.1. Contexte et Hypothèses
Le présent document détaille l'estimation de la consommation électrique de la Station Sol du projet Mercury. L'objectif est de dimensionner la batterie interne afin de garantir une autonomie de 3 heures (couvrant la phase de préparation, le tir "Space Shot", et la récupération), tout en respectant la contrainte mécanique stricte de portabilité (poids total 3 kg, réf: GS-MECA-02).
Hypothèses de calcul :
Utilisation continue de l'ensemble des sous-systèmes (réseau, écrans, traitement de données).
Luminosité de l'écran principal réglée à son maximum pour répondre à l'exigence de lisibilité en plein soleil (>800 nits, réf: GS-ENV-01).
Prise en compte d'une marge de sécurité pour contrer les pertes de conversion et les chutes de tension liées aux températures extrêmes (jusqu'à -10°C, réf: GS-ENV-02).
3.2.2. Bilan de Puissance
Le tableau ci-dessous répertorie la consommation électrique estimée en fonctionnement nominal pour chaque bloc fonctionnel de la Station Sol :
| ID Réf. | Composant / Sous-système | Consommation Nominale Estimée (W) | Justification / Remarque Technique |
| SYS-01 | Unité Centrale (RPi CM5) | 7.0 W | Charge CPU moyenne (~50-70%) lors du traitement télémétrique et de l'affichage ROS/GUI. |
| DISP-01 | Écran Tactile Principal | 12.0 W | Consommation maximale (rétroéclairage poussé à >800 nits). |
| DISP-02 | Écran Secondaire (Statut) | 2.5 W | Affichage OLED ou LCD basse consommation (constantes vitales). |
| MEM-01 | Stockage SSD M.2 (PCIe) | 3.0 W | Écriture continue des logs système et enregistrement vidéo (redondance SD négligeable). |
| INP-01 | Périphériques d'entrée | 1.0 W | Clavier AZERTY, Trackpad, Encodeurs et microcontrôleur de gestion (ex: RP2040). |
| COM-01 | Connectivité (WiFi/BT/Eth) | 2.0 W | Module PCIe Key E actif et lien Ethernet en mode attente/transfert. |
| AUD-01 | Audio (Haut-parleurs) | 1.5 W | Amplificateur audio sollicité occasionnellement (alertes). |
| PWR-01 | Pertes Joules / Régulateurs | 3.0 W | Estimation de dissipation thermique des convertisseurs DC/DC (rendement de ~85-90%). |
| CONSOMMATION TOTALE ESTIMÉE | 32.0 W | Consommation continue moyenne du système complet. |
3.2.3. Calcul des Besoins Énergétiques
Sur la base de la consommation totale estimée, nous calculons l'énergie totale requise pour la durée de la mission.
- Énergie de base (Nominale) : 32W
- Application du coefficient de sécurité : 20%
Pour éviter une décharge profonde (nuisible aux cellules Lithium), compenser le vieillissement de la batterie et garantir le fonctionnement par temps froid (-10°C), une marge de sécurité de 20% est appliquée.
3.2.4. Dimensionnement de la Batterie et Poids Estimé
Pour atteindre la capacité cible de 115.2 Wh, nous envisagions cette architectures d'alimentation principales pour la Station Sol :
L'utilisation d'un pack batterie Lithium-Ion (Li-Ion) en configuration 3S (Nominal: 11.1V, Max: 12.6V) est standard pour ce type d'équipement.
- Capacité requise :
- Poids estimé de la batterie :
3.2.5. Conclusion
Une capacité énergétique embarquée de 115 à 120 Wh est requise pour assurer les 3 heures d'autonomie avec l'écran haute luminosité au maximum.
Une batterie Li-Ion standard de 12V / 10.4Ah répondra parfaitement à ce besoin. Son poids contenu (environ 500g) permet de rester en parfaite conformité avec la spécification matérielle GS-MECA-02 (Poids total de la station \le 3 kg), laissant environ 2.5 kg pour le châssis, le RPi CM5, les écrans et l'électronique périphérique.
Pour gagner de l’espace, nous pouvons mettre deux batteries de 12V / 5.2 Ah en parallèle.
3.3 Bilan de puissance station télémesures
Sous-système : Station de Télémesures Extérieure (Antenna Tracker) Révision : 1.0 Objectif : Dimensionnement de l'alimentation embarquée pour garantir une autonomie de 3 heures en condition de suivi intensif (tracking de fusée jusqu'à Mach 3).
3.3.1. Contexte et Hypothèses
Ce document évalue la consommation électrique de l'unité de télémesure extérieure. Contrairement à la station sol, ce système intègre des actionneurs mécaniques (moteurs pas-à-pas) fonctionnant en continu pour le suivi de la cible, ainsi qu'un ordinateur Edge (Raspberry Pi 5) exécutant une pile logicielle lourde (ROS 2, calculs cinématiques TF2, décodage LoRa multi-SF).
Hypothèses de calcul :
- Autonomie cible : 3 heures de fonctionnement ininterrompu.
- Moteurs pas-à-pas alimentés en continu (maintien du couple de maintien "Holding Torque" et mouvements dynamiques rapides pour compenser l'effet Doppler et suivre la trajectoire balistique).
- Respect de l'exigence SOL-ELEC-03 : Séparation physique des lignes d'alimentation via des UBEC/Régulateurs isolés pour le RPi et les moteurs, afin d'éviter les chutes de tension (brownouts) lors des pics d'appels de courant des moteurs.
3.3.2. Bilan de Puissance
Le tableau ci-dessous détaille la consommation électrique moyenne estimée en phase de vol actif (suivi dynamique continu) :
| ID Réf. | Composant / Sous-système | Consommation Moyenne Estimée (W) | Justification / Remarque Technique |
| COMP-01 | Ordinateur Edge (RPi 5) | 8.5 W | Charge CPU élevée continue (nœuds ROS 2, prédiction EKF, traitement RF et enregistrement rosbag sur SD/USB). |
| MOT-01 | Moteurs Pas-à-Pas (Pan & Tilt) | 16.0 W | Estimation pour 2 moteurs (type NEMA 17) pilotés par drivers TMC2209. Consommation lissée incluant mouvements et couple de maintien. |
| RF-01 | Chaîne de Réception RF | 1.5 W | Alimentation du LNA (Amplificateur Faible Bruit) et des récepteurs LoRa écoutant sur de larges bandes passantes. |
| SENS-01 | Capteurs & Navigation | 1.0 W | Module GPS Trackeur, centrale inertielle (IMU) et capteur de courant INA219. |
| COM-01 | Transmission Réseau | 1.0 W | Interface physique Ethernet (transfert TCP/IP vers la station sol). |
| PWR-01 | Pertes UBEC RPi (5V) | 2.0 W | Pertes thermiques du régulateur step-down abaissant la tension de la batterie vers 5V (rendement ~85%). |
| PWR-02 | Pertes UBEC Moteurs | 2.5 W | Pertes thermiques du régulateur dédié aux moteurs (si abaissement de tension nécessaire, sinon pertes de commutation des TMC2209). |
| CONSOMMATION TOTALE ESTIMÉE | 32.5 W | Consommation continue moyenne du système complet. |
3.3.3. Calcul des Besoins Énergétiques
Sur la base de cette consommation continue estimée à ~32.5 W :
- Énergie de base (Nominale) :
- 32.5W
- Application du coefficient de sécurité (20%) : Les moteurs peuvent générer des pics de consommation imprévisibles (rafales de vent sur l'antenne Yagi-Uda obligeant le système à forcer pour maintenir la position). De plus, l'équipement doit fonctionner en extérieur (potentiellement jusqu'à -10 degrees Celsius ce qui réduit l'efficacité des batteries.
3.3.4. Dimensionnement de la Batterie
Pour la station de télémesures, le choix de la tension (Voltage) est critique. Les moteurs pas-à-pas nécessitent une tension d'alimentation élevée pour conserver leur couple à haute vitesse (ce qui est crucial pour suivre une fusée à Mach 3). Une alimentation 5V ou même 12V classique peut s'avérer insuffisante pour des mouvements balistiques brusques.
Architecture 24V
L'utilisation d'une batterie Lithium-Polymère (LiPo) 6S (Nominal: 22.2V) ou Li-Ion 6S offre une dynamique optimale pour les drivers TMC2209 et les moteurs pas-à-pas.
- Capacité requise :
- Recommandation Composant : Batterie LiPo/Li-Ion 6S de 5500 mAh à 6000 mAh.
- Avantage : Mouvements très fluides et couple élevé à haute vitesse. Les UBEC s'occuperont d'abaisser le 24V en 5V propre pour le Raspberry Pi 5.
3.3.5. Conclusion
Pour garantir le suivi d'un vol de la rampe à la récupération (3 heures), la Station de Télémesures nécessite une batterie d'une capacité d'environ 120 Wh. Afin d'optimiser les performances mécaniques du Pan-Tilt et de tirer pleinement parti du microstepping des drivers TMC2209 (Exigence SOL-ELEC-01), il est recommandé d'opter pour une architecture de batterie en 24V (6S) d'une capacité de 5500 mAh minimum. Cela couvrira la consommation lourde du Raspberry Pi 5 tout en garantissant un suivi fluide et réactif de l'antenne.
4. Architecture logiciel
4.1 Station sol
4.1.1. Choix Technologiques
Pour garantir une fluidité d'affichage (latence < 100ms) et une intégration native avec le matériel (GPIO, I2C, UART) du Raspberry Pi CM5, la pile logicielle suivante est sélectionnée :
- Système d'Exploitation : Raspberry Pi OS (Debian 12 - Bookworm) en version 64-bit avec environnement de bureau allégé (Wayland/X11) pour maximiser les ressources CPU.
- Langage Principal : Python 3.11+ (Choisi pour sa rapidité de développement, sa gestion des mathématiques et ses bibliothèques d'interface de pointe).
- Framework Graphique (GUI) : PyQt6 (ou PySide6). Standard industriel pour les interfaces complexes, permettant de gérer les deux écrans (Principal et Secondaire) nativement.
- Visualisation de Données : PyQtGraph. Accélération matérielle pour dessiner les courbes de télémétrie à plus de 60 FPS sans surcharger le processeur (contrairement à Matplotlib).
- Middleware Réseau (Local) : Intégration de rclpy (ROS 2 Python) ou utilisation de WebSockets/TCP pour recevoir les données du Tracker d'antenne distant.
4.1.2. Architecture Multi-Processus (Threading & Multiprocessing)
Afin d'éviter que l'interface graphique ne se fige lors de la réception d'un paquet de données ou du décodage d'une image vidéo, le logiciel est divisé en 5 "Threads" (fils d'exécution) asynchrones :
- Thread 1 : Interface Graphique Principale (Main GUI Loop)
- Rôle : Gère l'affichage (boutons, rendu des courbes, mise à jour des textes). Priorité haute pour garantir la sensation de fluidité.
- Thread 2 : Listener Réseau (Télémétrie entrante)
- Rôle : Écoute le port Ethernet en continu. Désérialise les paquets bruts (Altitude, Accélération, Vitesse, GPS, État Batterie) et les place dans une file d'attente (Queue).
- Thread 3 : Pipeline Vidéo (Analogique & SSDV)
- Phase 0-10 km : Capture le flux analogique numérisé via USB (/dev/video0) avec OpenCV/GStreamer.
- Phase > 10 km : Écoute les trames radio SSDV (Slow Scan Digital Video), réassemble l'image (JPEG) et l'envoie à l'interface.
- Thread 4 : Gestion I/O Matériel (Boutons & Encodeurs)
- Rôle : Surveille les GPIO/I2C. Lit les encodeurs (Volume/Luminosité) et détecte l'appui sur le Bouton Macro pour déclencher les commandes d'Uplink.
- Thread 5 : Cloud Sync Manager (Export Serveur)
- Rôle : Gère la communication asynchrone avec le serveur de l'association Apollos Science Innovator (voir Section 5).
4.1.3. Agencement de l'Interface
L'interface est conçue pour éviter la surcharge cognitive (Dark Mode, polices monospace).
Fenêtre Principale (Écran Tactile 1)
Divisée en 4 zones critiques :
- Zone Vidéo (Centre-Gauche) : Flux vidéo actif avec incrustation OSD (On-Screen Display) des données vitales.
- Zone Graphiques (Droite) : Courbes déroulantes en temps réel (Altitude vs Temps, Vitesse Mach vs Temps).
- Zone Attitude (Bas-Gauche) : Modèle 3D schématique ou horizon artificiel orienté via les quaternions de l'IMU.
- Console de Commandes (Bas) : Interface "Uplink" et console de logs défilants (événements système).
Fenêtre Secondaire (Écran Statut 2)
Application indépendante affichant les constantes vitales : Jauge de Batterie de la Station (%), Tension Batterie du Tracker, Heure UTC, Temps T-Minus, et Température CPU.
4.1.4. Enregistrement Local des Données
Pour respecter l'exigence GS-DATA-01 (redondance), chaque paquet reçu est traité localement :
- Format : Sauvegarde brute en fichier .CSV et base de données légère (SQLite ou InfluxDB).
- Redondance : Un processus en tâche de fond écrit simultanément sur le SSD M.2 NVMe et sur la carte SD. Ce fonctionnement garantit la sécurité des données même en cas de perte totale de connectivité internet sur le pas de tir.
4.1.5. Synchronisation et Export vers le Serveur d’ASI
Afin de centraliser l'historique des lancements et permettre l'analyse post-vol par l'équipe, la base de données est exportée vers le serveur de l'association selon un principe de résilience (Store & Forward).
Logique de fonctionnement (Store & Forward)
- Store : Écriture prioritaire sur le SSD M.2 local.
- Surveillance : Le Thread 5 (Cloud Sync Manager) vérifie la disponibilité d'une connexion internet (ex: point d'accès 4G partagé).
- Forward : Dès qu'une connexion stable est détectée, les données en attente sont expédiées. Si le réseau est indisponible, l'export s'effectuera automatiquement au retour de la mission.
Modes d'Exportation
- Mode "Live Telemetry" (Direct) : Utilisation de protocoles légers (MQTT ou REST API via requêtes POST) pour envoyer des trames de base (Altitude, Vitesse, GPS) à fréquence réduite. Permet d'alimenter un tableau de bord public sur le site web de l'association.
- Mode "Full Database Dump" (Post-Vol) : Transfert sécurisé (SFTP) d'une archive compressée (.zip) contenant la base SQLite, les logs textuels et les vidéos SSDV à la fin de la mission.
Sécurité et Authentification
- Chiffrement : Toutes les communications avec le serveur s'effectuent via TLS/SSL (HTTPS).
- Authentification : Le système embarque une Clé API cryptée ; le serveur rejette toute donnée non signée par l'association.
- Intégrité : Génération d'un hash cryptographique (SHA-256) du fichier de base de données avant l'envoi pour détecter toute corruption durant le transfert.
4.2 Station télémesures
4.2.1. Objectif et Philosophie ROS 2
L'ordinateur "Edge" (Raspberry Pi 5) embarqué sur l'unité de télémesure a pour rôle de pointer mécaniquement une antenne directionnelle vers une fusée évoluant jusqu'à Mach 3 et 100 km d'altitude. Pour garantir un haut niveau de résilience, l'architecture logicielle repose sur le framework ROS 2 (Humble ou Iron). Cette approche par micro-services (Nœuds) garantit que la défaillance d'un composant matériel (ex: perte du GPS) n'entraîne pas le crash complet du système de suivi.
4.2.2. Topologie des Nœuds (Node Graph)
Le système est divisé en quatre catégories de nœuds fonctionnant de manière asynchrone, communiquant via le protocole DDS intégré à ROS 2.
Nœuds d'Acquisition (Sensors)
- lora_receiver_node : Pilote la puce RF via bus SPI. Gère la réception multi-SF (Spreading Factors) sur une large bande passante (BW \ge 250\text{ kHz}) pour absorber le décalage de fréquence dû à l'effet Doppler (Exigence SOL-SW-01). Il publie les paquets décodés sur le topic /rocket/telemetry_raw.
- tracker_gps_node : Lit les coordonnées absolues de la station au sol sur le site de lancement.
- tracker_imu_node : Lit l'attitude de la base (assiette, inclinaison) pour compenser un positionnement sur un terrain non plat.
Nœuds de Traitement Mathématique (Processing)
- ballistic_predictor_node (Filtre EKF) : Nœud critique (Exigence SOL-SW-05). Il écoute les positions GPS reçues de la fusée. En cas de perte de signal radio (ex: passage du mur du son ou masquage par les tuyères), ce nœud prend le relais en utilisant un Filtre de Kalman Étendu (EKF) basé sur le profil aérodynamique de la fusée pour prédire sa position future et continuer à orienter l'antenne "à l'aveugle".
- kinematics_tf2_node : Utilise la bibliothèque standard de transformations spatiales de ROS 2 (TF2). Il calcule le vecteur pointant de l'antenne vers les coordonnées 3D de la fusée, et le convertit en consignes d'angles absolus.
Nœuds d'Actionnement (Control)
- motor_controller_node : Écoute les topics de consignes d'angles (Azimut/Élévation). Pilote les drivers de moteurs pas-à-pas (TMC2209) en générant des signaux matériels (STEP/DIR) ou via UART pour exploiter le microstepping, garantissant une rotation fluide sans vibrations perturbant la réception RF.
- homing_sequence_node : Activé uniquement au démarrage, il utilise les capteurs de fin de course (Endstops) pour étalonner le Pan-Tilt et définir le point Zéro (Nord vrai / Horizon géographique).
Nœuds de Sécurité et Données (Safety & Data)
- safety_watchdog_node : Surveille les "Heartbeats" (battements de cœur) de tous les autres nœuds. Si le nœud kinematics ne répond plus pendant 500ms, le Watchdog envoie une commande d'arrêt d'urgence au motor_controller_node pour figer instantanément l'antenne et éviter un enroulement destructeur des câbles (Exigence SOL-SW-07).
- rosbag_logger_node : Enregistre en continu l'intégralité du trafic ROS 2 sur la clé USB/SD locale pour permettre un "Replay" exact du vol à des fins de débogage post-mission (Exigence SOL-SW-06).
4.2.3. Arbre de Transformations Spatiales (TF2 Tree)
Pour simplifier les calculs trigonométriques complexes, le Tracker utilise l'arbre de transformation spatiale suivant maintenu par le nœud kinematics_tf2_node :
- world (Référentiel géodésique absolu, WGS84)
- —> tracker_base_link (Position GPS statique de la valise sur le pas de tir)
- —> pan_link (Rotation en Azimut, 0 à 360°)
- —> tilt_link (Rotation en Élévation, 0 à 90°)
- —> antenna_yagi_link (Axe du lobe principal de l'antenne RF)
- Cible : rocket_link (Coordonnées mobiles reçues par télémétrie)
Le calcul d'asservissement consiste simplement à minimiser en temps réel l'erreur angulaire entre le vecteur d'antenna_yagi_link et les coordonnées de rocket_link.
4.2.4. Communication avec la Station Sol (Ethernet DDS)
Afin de ne pas surcharger la boucle radio LoRa, la Station de Télémesure (extérieure) et la Station Sol (la mallette de l'opérateur) sont physiquement reliées par un câble Ethernet longue portée (Exigence SOL-COM-01).
- Routage DDS : ROS 2 utilisant le protocole natif DDS (Data Distribution Service) sur IP, l'ordinateur de la Station Sol s'abonne directement au topic /rocket/telemetry_clean publié par le Raspberry Pi 5 du Tracker.
- Standardisation : Les données complexes sont sérialisées via JSON ou Protobuf avant d'être expédiées sur le réseau TCP/IP, garantissant une interopérabilité totale avec l'interface graphique en Python (PyQt6) de la Station Sol.
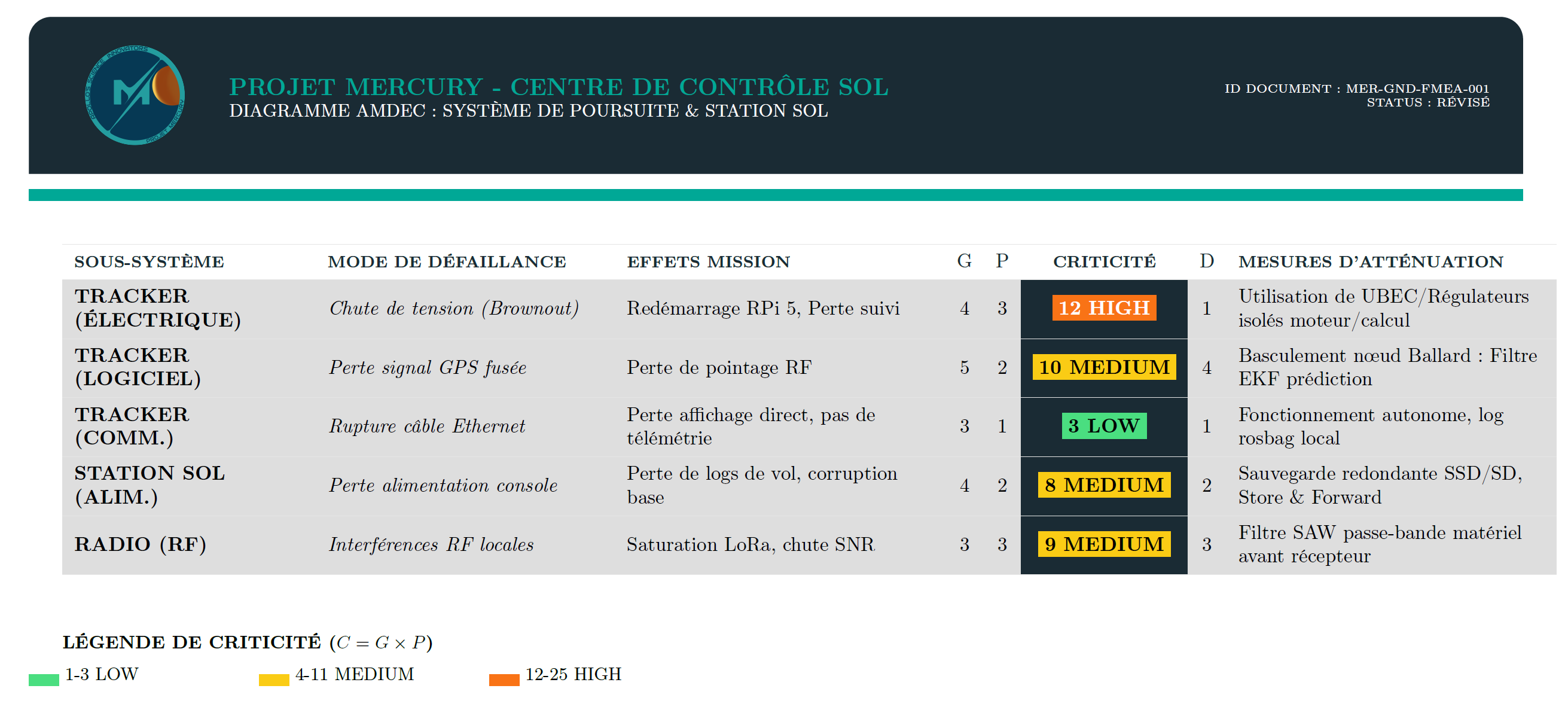
5.Analyse de risques